Survey scanning and performance
Contents
The observation strategy[edit]
The Planck observation strategy, or scanning strategy, made use of the characteristics of the Planck spacecraft Planck-Early-I[1] and orbit in order to achieve the survey goals in terms of sky coverage and scanning directions.
The Planck focal plane scanned the sky in the way explained in the figure below.

The 353 GHz row scanned the sky in small circles with an 85 deg. bore-sight angle from the spin axis. 545 GHz, 857 GHz, and 143 GHz bolometers, as well as LFI radiometers 25 and 26 had a slightly smaller bore-sight angle, while the other part of the Planck focal plane had larger ones (up to about 89 deg.). The Planck spacecraft spun at a rate of 1 rpm.
Planck, being at L2, moved along the Ecliptic at approximately one degree per day, and needed to keep the Solar aspect angle below about 9 degrees at all times. In practice, during the surveys, the limit considered was 8 deg. Another celestial constraint is that the angle between the Planck spin axis and the anti-Earth direction could not exceed 15 deg. (relaxed to 17 deg. from Survey 5 onward). These constraints had a very direct influence on the chosen scanning strategy.


The path followed by the Planck spin axis was defined with respect to the Ecliptic plane. It corresponded to a motion in longitude which maintained an anti-Sun pointing (about one degree per day), to which was added a cycloidal motion (precession) of the spin axis around the anti-Sun position (fiducial point). The cycloidal path was defined by the functions:
$ λ = θ sin((-1)^n ω (t-t_0)+φ) $ (eq. 1),
$β = -θ cos((-1)^n ω(t-t_0) + φ) $ (eq. 2),
where λ is the angular distance from the fiducial point in Ecliptic longitude, β the angular distance from the fiducial point in Ecliptic latitude, θ the spin axis precession amplitude, ω the pulsation of the precession, φ its phase, n the parameter which controls the motion direction of the precession, t is the time, and $t_0$ is the first time during the Planck survey at which the fiducial point crosses the Ecliptic longitude =0 line.

The reasons to decide to use such a precession of the spin axis are the following.
- An excursion of the spin axis from the anti-Sun direction is required to fully observe the whole sky (no excursion would leave a large area unobserved around the Ecliptic poles).
- The precession motion keeps the Sun aspect angle constant during the whole survey, therefore minimizing the thermal constraint variations on the spacecraft.
The following precession parameters were chosen for the BSS.
- Amplitude θ = 7.5deg. (this value is the lowest possible which allows the whole sky to be covered with all detectors).
- n = 1 (anti-clockwise motion as seen from the Sun).
- Pulsation ω = 2π / (half a year), faster precession was considered, and has interesting advantages, but was not possible given the constraints if one wants to keep a 7.5 deg. amplitude (which is necessary to cover the whole sky).
- The phase of the precession was decided according to this set of criteria (in order of importance):
a) respecting the operational constraints;
b) allowing the largest possible angle between two scans on the Crab Nebula (a polarization calibrator);
c) avoiding null dipole amplitude for the whole mission;
d) optimizing the position of the planets in the beginning of the survey and with respect to the feasibility of their recovery;
e) placing the two “deep fields” where Galactic foregrounds are minimum;
f) allowing a reasonable survey margin (i.e. the time allowed to recover lost pointings if a problem occurs).
The phase is 340 deg. for Surveys 1 to 4, and 250 deg. for Surveys 5 to 8.
The scanning strategy for the second year of Routine Operations (i.e. Surveys 3 and 4) was exactly the same as for the first year, except that all pointings were shifted by 1 arcmin along the cross-scanning direction, in order to provide finer sky sampling for the highest frequency detectors when combining two years of observations.
The change of phase between Survey 4 and Survey 5 occurred because it was found essential (especially on the HFI side) that scanning direction crossings should be increased in the Planck survey. By choosing a phase 90 deg. away from the original one, one optimizes the scanning strategy in this respect.
The details of the justifications for these parameters can be found in PL-WG9-TN-001.
The scanning strategy parameters are input to the PSO Survey Planning and Performance Tool, which is the software which generates the series of pointing records to be sent out to MOC for implementation.
An approximate visualization of the Planck scanning strategy can be found here and here.
Spin axis manoeuvres and exact pointings[edit]
The motion of the spin axis was not continuous. Every change in the spin axis position was initiated by a manoeuvre which required less than 5 minutes time to complete.
The duration between spin-axis manoeuvres is hereafter referred to as the “dwelling time" and the angular distance between manoeuvres along the spin axis path is hereafter referred to as the “spacing”.
The dwelling times and spacings are defined as follows:
- the spacings are fixed to 2arcmin, which roughly corresponds to the Nyquist criterion for sampling the highest-frequency HFI detectors;
- the dwell times vary from 2360 s to 3904 s.
The exact series of coordinates and dwell times are set by Eqs. (1) and (2) when one has fixed the spacings.
Data gap recoveries[edit]
Gaps in the data flow can occur for various reasons.
Anomalies may occur at spacecraft or instrument level, but also due to failures in the ground-to-spacecraft link or the ground segment itself. The adverse effects of such anomalies may be the loss of scientific data corresponding to one or several planned pointings, which have not been acquired and/or stored in memory.
Failure to acquire proper scientific data may occur to one or both instruments.
When a gap occurred, scientific criteria were applied to decide whether to recover the data through the Small-Gap Recovery procedure.

The Small-Gap Recovery (SGR) procedure could be applied by MOC or PSO.
- MOC-triggered SGR: Within its nominal scheduling procedure for an OD, the MOC searches the PPL for PREF corresponding to the OD being processed and any pointings which are the subject of a Small Gap Recovery. As the PREF are sorted in chronological order according to their nominal start time, those corresponding to a small gap will naturally be the earliest. After checking attitude constraints, all observable pointings are listed and their dwell times reduced (initially) to the Minimum Dwell Time (MDT), as given in the PPL.
Having included all valid PREF the required slew times are calculated. With the required slew times and minimum dwell times for all pointings, the OD schedule may be under-populated; in this case the dwell times of all scheduled pointings will be increased equally to make use of all available time in the OD. If the resulting schedule is over-populated, even with MDT for all pointings, the recovery cannot be constrained to a single OD. The sequence of pointings for the ODs involved is optimized in PREF scheduling and dwell times determined in order to effect the recovery and revert to the nominal timeline as quickly as possible.
- PSO-triggered SGR:
PSO declares a small gap when pointings that have been executed result in data of insufficient quality or inadequate frequency coverage. This assessment is based on data quality and instrument health information provided by the DPCs. The algorithm that was used by the PSO to check the scientific validity of a pointing was implemented within the SPPT software tool. The SPPT ingested on a weekly basis a Weekly Health Report (WHR) for the HFI and LFI containing information on the working status of each detector and their expected condition over the following four weeks. On a daily basis, a Daily Quality Report (DQR) provided by the DPCs for both instruments, included a set of parameters that described the quality of the detection achieved by each individual detector for every pointing executed.
The scheme for declaring a Small-Gap Recovery from PSO is the following.
- If a pointing fails to meet the chosen requirement, it becomes an SGR candidate.
- If there are at least 12 consecutive pointings which are declared SGR candidates, and the problem has been identified and solved, then an SGR is triggered. Recoveries are only carried out if the recovery slewing is guaranteed to be in OCM. MOC carried out this analysis and decided whether they should perform the SGR accordingly.
- The start and end times of the gap and the list of the pointing numbers (or just the numbers of the first and last pointings to be recovered) were then sent to MOC by E-mail, with the notification to start a Small-Gap Recovery.
- MOC implemented the Small-Gap Recovery, provided the pointings could still be scheduled with respect to their latest start time, using the same scheme as described in the MOC-triggered SGR section
Throughout the Planck mission, data losses were very rare. In fact Small-Gap Recovery was applied only a couple of times.
Special observations[edit]
The special observations are now described.
- Normal scanning on Solar System objects for calibration purposes.


This concerns the following objects (specifically planets): Mars; Jupiter; Saturn; Uranus; and Neptune. Their thermal emission in the far-infrared and the small angular sizes make them ideal calibrators for bolometers and radiometers.
Mars is a particularly interesting calibrator for Planck, because of its proper motion. However this proper motion makes it difficult to observe it many times during the mission.
Jupiter is the brightest source for (non-polarized) calibration. Saturn was also used significantly, with Uranus and Neptune being secondary calibrators.
- Normal scanning on other (non-moving) sources for calibration purposes.
This concerns mostly the Crab Nebula for polarization calibration purposes. This supernova remnant is highly polarized, and as such represents the main polarization calibrator for Planck.
- Special pointings during the calibration phase, not relative to celestial sources.
- "Deep rings," special observations that were performed on each passage of Jupiter and the Crab Nebula, from January 2012 onward.
These consist of very deeply sampled observations (0.5') with the spin axis along the Ecliptic plane, typically lasting two to three weeks.
Such observations benefit from special relaxing of the celestial constraints, with Solar Aspect Angles < 9 deg. rather than < 8 deg. during cycloidal surveying.
- "Drift scans," special observations performed on Mars, making use of its proper motion.
Start and end of surveys[edit]
The completion of a given “survey” is declared when the logical AND of all frequency-coverage maps is greater than 95 %, OR the sky has been surveyed over a consecutive period of 7.5 months. Note that this definition is that of the Project Scientist and Planck Science Office. Data processing centres do not use exactly the same concept of surveys to create "survey" maps.
In practice, since the gaps during the surveys have always been very small, this results in approximately 6 months per survey.

- Survey 1: starts 13 August 2009, ends 13 February 2010.
- Survey 2: starts 14 February 2010, ends 13 August 2010.
- Survey 3: starts 14 August 2010, ends 13 February 2011.
- Survey 4: starts 14 February 2011, ends 29 July 2011.
(This survey was shortened in ordered to start earlier with the new scanning strategy; see above).
- Survey 5: starts 29 July 2011, ends 30 January 2012.
- Survey 6 (LFI only): starts 30 January 2012, ends 31 July 2012.
- Survey 7 (LFI only): starts 31 July 2012, ends 31 January 2013.
- Survey 8 (LFI only): starts 1 February 2013, ends 1 August 2013.
- Survey 9 (LFI only): ends Oct. 3rd, 2013
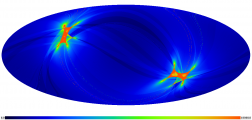
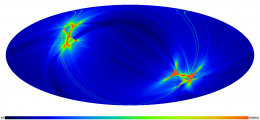
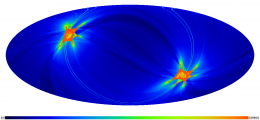
Completion of full sky coverage during Surveys 1-2[edit]
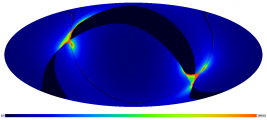
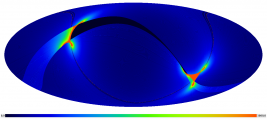
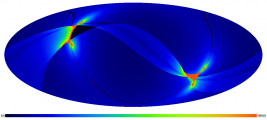
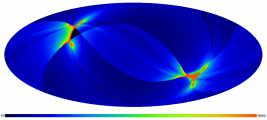
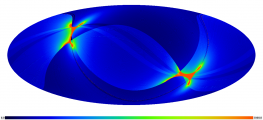
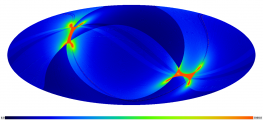
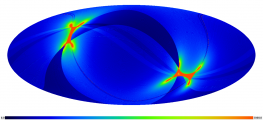
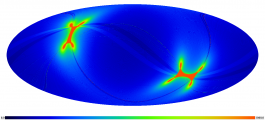
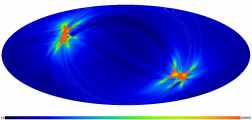
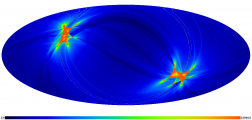
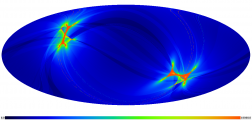
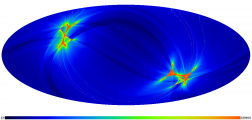
The picture gallery below exhibits the progress of sky coverage during the first months of survey (black colour = unobserved areas).
- HFI 353 GHz integration time after N months of survey. The units here are seconds per square degree, normalized to one detector.
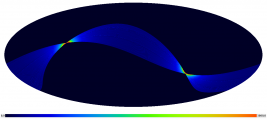
After 1 month
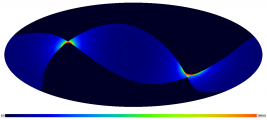
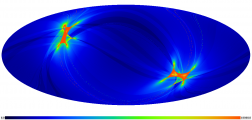
After 2 months
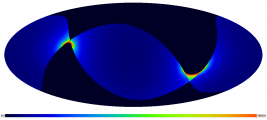
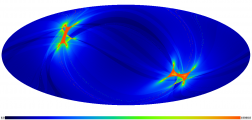
After 3 months
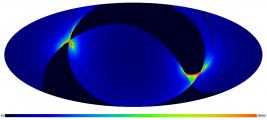
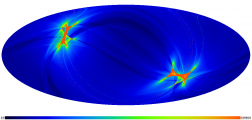
After 4 months
After 5 months
After 6 months
After 7 months
After 8 months
After 9 months
After 10 months
After 11 months
After 12 months












Main planet and Crab observations[edit]
Solar System objects and the Crab Nebula have been observed many times during the Planck surveys. Here is a list of these observations, with the deep rings (Jupiter and the Crab) and drift scans (Mars only) in boldface.
- Crab: 16-22 September 2009
- Mars: 17-29 October 2009
- Jupiter: 25 October – 1 November 2009
- Neptune: 1-8 November 2009
- Uranus: 6-16 December 2009
- Saturn: 2-8 January 2010
- Crab: 6-12 March 2010
- Mars: 9-18 April 2010
- Neptune: 15-23 May 2010
- Saturn: 13-22 June 2010
- Uranus: 27 June – 5 July 2010
- Jupiter: 1-9 July 2010
- Crab: 15-21 September 2010
- Neptune: 3-11 November 2010
- Jupiter: 9-18 December 2010
- Uranus: 12-21 December 2010
- Saturn: 15-22 January 2011
- Crab: 7-12 March 2011
- Neptune: 18-26 May 2011
- Saturn: 30 June - 9 July 2011
- Uranus: 3-11 July 2011
- Jupiter: 9-15 August 2011
- Crab: 10-18 September 2011 (performed with the 250 deg. phase cycloidal strategy)
- Crab: 20-23 September 2011 (performed with the 340 deg. phase cycloidal strategy)
- Mars: 8-16 December 2011 ("drift scan", Mars allowed to move through the Planck focal plane via its proper motion)
- Mars: 17-26 December 2011 (normal scanning)
- Jupiter: 8-30 January 2012 (deep ring)
- Crab: 26 February - 16 March 2012 (deep ring)
- Jupiter: 1-14 September 2012 (deep ring)
- Crab: 14 September - 1 October 2012 (deep ring)
- Neptune: 19-27 November 2012
- Uranus: 24-30 December 2012
- Saturn: 30 January - 5 February 2013
- Jupiter: February 2013 (deep ring)
- Crab: Feb. 28th - March 15th, 2013 (deep ring)
- Neptune: June 4th - June 12th, 2013
- Uranus: July 9-16th, 2013
- Saturn: July 20-26th, 2013
- Crab: Sept. 10th - Oct. 3rd, 2013 (deep ring)
Note that on Sept. 14-16th, 2013, LFI also performed a special dipole calibration observation.
Resulting integration time distribution[edit]
The integration time after the end of HFI operations (January 2012) is shown in the following picture gallery.
Units are seconds per square degree, normalized to one detector, for all maps. The projection is full-sky Mollweide centred on the Galactic centre.
- Integration time after the end of HFI operations (January 2012). The units here are seconds per square degree, normalized to one detector.
HFI 100 GHz 1,4
HFI 100 GHz 2,3
HFI 143 GHz 1-4
HFI 143 GHz 5-8
HFI 217 GHz 1-4
HFI 217 GHz 5-8
HFI 353 GHz
HFI 545 GHz / 857 GHz
LFI-25 (44 GHz)
LFI 30 GHz










References[edit]
- ↑ Planck early results. I. The Planck mission, Planck Collaboration I, A&A, 536, A1, (2011).
- ↑ Scanning strategy for mapping the Cosmic Microwave Background anisotropies with Planck, X. Dupac, J. Tauber, A&A, 430, 363-371, (2005).
- ↑ Planck pre-launch status: The HFI instrument, from specification to actual performance, J.-M. Lamarre, J.-L. Puget, P. A. R. Ade, F. Bouchet, G. Guyot, A. E. Lange, F. Pajot, A. Arondel, K. Benabed, J.-L. Beney, A. Benoît, J.-P. Bernard, R. Bhatia, Y. Blanc, J. J. Bock, E. Bréelle, T. W. Bradshaw, P. Camus, A. Catalano, J. Charra, M. Charra, S. E. Church, F. Couchot, A. Coulais, B. P. Crill, M. R. Crook, K. Dassas, P. de Bernardis, J. Delabrouille, P. de Marcillac, J.-M. Delouis, F.-X. Désert, C. Dumesnil, X. Dupac, G. Efstathiou, P. Eng, C. Evesque, J.-J. Fourmond, K. Ganga, M. Giard, R. Gispert, L. Guglielmi, J. Haissinski, S. Henrot-Versillé, E. Hivon, W. A. Holmes, W. C. Jones, T. C. Koch, H. Lagardère, P. Lami, J. Landé, B. Leriche, C. Leroy, Y. Longval, J. F. Macías-Pérez, T. Maciaszek, B. Maffei, B. Mansoux, C. Marty, S. Masi, C. Mercier, M.-A. Miville-Deschênes, A. Moneti, L. Montier, J. A. Murphy, J. Narbonne, M. Nexon, C. G. Paine, J. Pahn, O. Perdereau, F. Piacentini, M. Piat, S. Plaszczynski, E. Pointecouteau, R. Pons, N. Ponthieu, S. Prunet, D. Rambaud, G. Recouvreur, C. Renault, I. Ristorcelli, C. Rosset, D. Santos, G. Savini, G. Serra, P. Stassi, R. V. Sudiwala, J.-F. Sygnet, J. A. Tauber, J.-P. Torre, M. Tristram, L. Vibert, A. Woodcraft, V. Yurchenko, D. Yvon, A&A, 520, A9+, (2010).
(Planck) Low Frequency Instrument
revolutions per minute
(Planck) High Frequency Instrument
Planck Science Office
[ESA's] Mission Operation Center [Darmstadt, Germany]
Small Gap Recovery
Operation Day definition is geometric visibility driven as it runs from the start of a DTCP (satellite Acquisition Of Signal) to the start of the next DTCP. Given the different ground stations and spacecraft will takes which station for how long, the OD duration varies but it is basically once a day.
Pre-programmed Pointing List
Survey Performance and Planning Tool
Weekly Health Report
Daily Quality Report
[LFI meaning]: absolute calibration refers to the 0th order calibration for each channel, 1 single number, while the relative calibration refers to the component of the calibration that varies pointing period by pointing period.