|
|
| (31 intermediate revisions by 6 users not shown) |
| Line 5: |
Line 5: |
| | [[Image:FocalPlane.png| thumb|500px|center| The Planck Focal Plane]] | | [[Image:FocalPlane.png| thumb|500px|center| The Planck Focal Plane]] |
| | | | |
| − | In order to take full advantage of the Planck beams, we must know the individual detector positions to a precision of better than several arcseconds, over the course of the entire mission. | + | In order to take full advantage of the Planck beams, we must know the individual detector pointing positions to a precision of better than several arcseconds, over the course of the entire mission. |
| | | | |
| − | Spacecraft pointing comes from the on-board star tracker at 8 Hz between repointings (Attitude History File, AHF). This is translated via a series of three-dimensional rotations to a pointing for the centre of the focal plane and resampled to the HFI or LFI TOI data rate for convenience after correcting for the wobble angle (see below). We must then further rotate this focal-plane boresight pointing to the individual detector locations. Because neither the rotations from the star tracker to the boresight nor those from the boresight to the individual detectors are known exactly a priori, we must calibrate using flight data. | + | Spacecraft pointing comes from the on-board star tracker sampled at 8 Hz between repointings (Attitude History File, AHF). This is translated via a series of three-dimensional rotations to a pointing for the centre of the focal plane and resampled to the HFI or LFI TOI data rate for convenience. We must then further rotate this focal-plane boresight pointing to the individual detector locations. Because neither the rotations from the star tracker to the boresight nor those from the boresight to the individual detectors are known exactly a priori, we must calibrate them using flight data. |
| | | | |
| − | Specifically, measurements of HFI and LFI Detector pointing are based largely on observations of the brighter planets, with information from the much more frequent observation of lower-flux galactic and extragalactic high-frequency sources used to monitor and build a model of overall pointing drift. This long-term drift of the spacecraft attitude is due to changes in the moment of inertia of the spacecraft, and includes specific events which may induce sudden changes, essentially random as far as our ability to predict the effects thereof. In this delivery HFI used a model (described below) to follow the pointing drift continuously, while LFI uses two different focal plane description for the two time periods separated by operations perfomed on the instrument that modify the termal behaviour. The two approach are consistent to better than a few arcsec. | + | Specifically, measurements of HFI and LFI detector pointing are based largely on observations of the brighter planets, with information from the much more frequent observations of lower-flux Galactic and extragalactic high-frequency sources used to monitor and build a model of overall pointing drift. This long-term drift of the spacecraft attitude is due to changes in the moment of inertia of the spacecraft, and also includes specific events which may induce sudden changes, essentially random as far as our ability to predict their effects is concerned. In this delivery HFI used a model (described below) to follow the pointing drift continuously, while LFI uses two different focal plane descriptions for the two time periods separated by operations perfomed on the instrument that modified the thermal behaviour. The two approach are consistent to better than a few arcsec. |
| | | | |
| − | Note that for HFI the resulting pointing model cannot easily be directly compared to a physical/optical model: in particular, it includes a phase shift in the scan direction from the convolution and deconvolution of the detector transfer function, which is complex in the Fourier domain (see <cite>planck2013-p03c</cite> {{P2013|7}} ). This phase shift was not measured during normal operations, but a short campaign during which the spacecraft was spun at a higher rate will be used to determine these offsets in future date releases. Comparison with the initial optical model indicates that the in-scan change due to this phase shift is of the order of 1 arcminute. Note also that aberration is corrected in all observations. | + | Note that for HFI the resulting pointing model cannot easily be directly compared to a physical/optical model: in particular, it includes a phase shift in the scan direction from the convolution and deconvolution of the detector transfer function, which is complex in the Fourier domain (see {{PlanckPapers|planck2013-p03c}}). This phase shift was not measured during normal operations, but a short campaign during which the spacecraft was spun at a higher rate will be used to determine these offsets in future date releases. Comparison with the initial optical model indicates that the in-scan change due to this phase shift is of the order of 1 arcminute. Note also that aberration is corrected in all observations. |
| | | | |
| − | The final pointing model is measured to be better than 2 arcsecond rms in the co-scan and cross-scan directions averaged over ten-day periods, as shown below. Note that there are larger hourly drifts of up to 10 arcseconds due to interference from the radiometer electronics box assembly (REBA) as discussed more fully in <cite>planck2013-p03</cite> {{P2013|6}}).
| + | The final pointing model is measured to be better than 2 arcsecond rms in the co-scan and cross-scan directions averaged over ten-day periods, as shown below. Note that there are larger hourly drifts of up to 10 arcseconds due to interference from the radiometer electronics box assembly (REBA) as discussed more fully in {{PlanckPapers|planck2013-p03}}. |
| − | | |
| − | ==Wobble Angle ==
| |
| − | | |
| − | The wobble angle is the angle between the Principal Axis Reference Frame and the Body Reference Frame of Planck, both of which have their origin in the Planck Baricenter (ACMS, AHF-ICD). It is normally decomposed into its three components <math> \psi_1, \psi_2, \psi_3 </math>.
| |
| − | | |
| − | Pointings are determined by a set of rotations converting coordinates in the STR (Star Tracker) reference frame to ECL (Ecliptic) reference frame, i.e. defining the rotation matrix <math> R_{ecl,str} </math>. The matrix can be decomposend in a sequence of matrix mutiplications:
| |
| − | | |
| − | :<math> R_{ecl,str} = R_{ecl,A} R_{A,B} R_{B,str} </math>
| |
| − | | |
| − | here we used <math> R_{rfb,rfa} </math> to denote transformation from Rerference Frame RFA to Reference Frame RFB, and <math> R_{rfa,rfb} = R_{rfb,rfa}^{-1} </math>.
| |
| − | | |
| − | The <math> R_{B,str} </math> converts from STR coordinates to Body Reference Frame coordinates, it is a constant matrix.
| |
| − | | |
| − | :<math> \begin{bmatrix} \cos \beta & 0 & -\sin \beta \\ 0 & 1 & 0 \\ \sin \beta & 0 & \cos \beta \end{bmatrix} </math>
| |
| − | | |
| − | where <math> \beta = 85 \deg </math> is the STR boresight angle assumed to be constant and aligned with the telescope LOS, but this is not the case. The STR is located on the SVM, at about 1.5 m from the origin of the Body reference frame, a change in its position of 0.15 mm will result in a change of its orientation of about <math> 10^{-4} </math> radiants about 20 arcsec.
| |
| − | | |
| − | There is no way to measure directly those changes. So the effect is that to have an apparent change in the <math> \psi_1 </math>, <math> \psi_2 </math> (tilt angles as defined in the AHF) and <math> \psi_3 </math> (azimuth angle as defined in the AHF) angles: the reason is apparent immediately when looking at the way a perturbation in STR reference frame orientation propagates.
| |
| − | | |
| − | AHF provides wobble angle measures at 1 minute (<math> \psi_1 </math>, <math> \psi_2 </math>) and one OD (<math> \psi_3 </math>) rate. Indeed <math> \psi_3 </math> is provided at each pointing period but measures within each given OD are constant.
| |
| − | | |
| − | Assuming to have quaternions represented by rotation matrix <math> R_{ecl,B}(t) </math> at a time <math> t </math>, and assuming to have representative values of true wobble angles <math> \psi_{1,0} </math>, <math> \psi_{2,0} </math>, <math> \psi_{3,0} </math> and a way to estimate the apparent <math> \delta\psi_1(t) </math>, <math> \delta\psi_2(t) </math>, <math> \delta\psi_3(t) </math> it is possible to remove the apparent effect.
| |
| − | | |
| − | With the available information it can be done for <math> \psi_1 </math> and <math> \psi_2 </math>.
| |
| − | | |
| − | The correction algorithm initializes two rotation matrices as references using <math> \psi_1 </math> and <math> \psi_2 </math> from the first pointing period of the nominal mission:
| |
| − | | |
| − | :<math> R_{psi1} = \begin{bmatrix} \cos \psi_{1,ref} & \sin \psi_{1,ref} & 0 \\ -\sin \psi_{1,ref} & \cos \psi_{1,ref} & 0 \\ 0 & 0 & 1 \end{bmatrix} </math>
| |
| − | | |
| − | :<math> R_{psi2} = \begin{bmatrix} \cos \psi_{2,ref} & 0 & -\sin \psi_{2,ref} \\ 0 & 1 & 0 \\ \sin \psi_{2,ref} & 0 & \cos \psi_{2,ref} \end{bmatrix} </math>
| |
| − | | |
| − | Then, for each pointing period, builds two correction matrices using <math> \psi_1 </math> and <math> \psi_2 </math> as provided by the AHF in the Observation section:
| |
| − | | |
| − | :<math> R_{psi1}^T = \begin{bmatrix} \cos \psi_{1} & -\sin \psi_{1} & 0 \\ \sin \psi_{1} & \cos \psi_{1} & 0 \\ 0 & 0 & 1 \end{bmatrix} </math>
| |
| − | | |
| − | :<math> R_{psi2}^T = \begin{bmatrix} \cos \psi_{2} & 0 & \sin \psi_{2} \\ 0 & 1 & 0 \\ -\sin \psi_{2} & 0 & \cos \psi_{2} \end{bmatrix} </math>
| |
| − | | |
| − | From these matrices the correction matrix is build:
| |
| − | | |
| − | :<math> R = R_{psi1}^T R_{psi2}^T R_{psi2} R_{psi1} </math>
| |
| − | | |
| − | Each quaternion of the AHF is finally corrected using <math> R </math>.
| |
| | | | |
| | ==Stellar Aberration== | | ==Stellar Aberration== |
| Line 69: |
Line 27: |
| | ==Beam Rotation== | | ==Beam Rotation== |
| | | | |
| − | The rotation of the beam with respect to North is the <math> \psi </math> angle and is computed rotating the corrected quaternions <math> Q </math> using: | + | The rotation of the beam with respect to North is the <math> \psi </math> angle and is computed rotating the corrected quaternions <math> Q </math>. |
| − | | |
| − | :<math> R = R_{\theta} R_{\phi} Q ax2det </math>
| |
| | | | |
| | The resulting rotation matrix represents the rotation of the beam, the <math> \psi </math> angle is then: | | The resulting rotation matrix represents the rotation of the beam, the <math> \psi </math> angle is then: |
| Line 77: |
Line 33: |
| | :<math> \psi = -\arctan (R[0][1],R[0][0]) </math> | | :<math> \psi = -\arctan (R[0][1],R[0][0]) </math> |
| | | | |
| − | == Initial measurements: Mars 1 and other planets ==
| + | == Focal plane drift == |
| − |
| |
| − | The first observation of Mars, which occured around 180 days from launch, is the baseline against which other objects are compared. Here, we show the relative pointing of Mars 1 to the pre-launch RFFM.
| |
| − |
| |
| − | [[Image:Mars1.png|thumb|500px|center| Individual detector pointing measured from the first Mars crossing, relative to the pre-launch RFFM model.]]
| |
| − | | |
| − | == Focal plane drift: map-based measurement of detector positions == | |
| − | | |
| − | Prior to modeling of systematic changes in the Planck pointing, we find secular drifts of order one arcminute over the course of the nominal mission. We monitor this by making point-source catalogs based on single Planck surveys, only counting those objects which are observed over the course of less than seven days (this limits us to observations away from the ecliptic poles where Planck's observing strategy is highly cross-linked). We cross-match these catalog positions to the known IRAS point-source catalog <cite>Lingyu2009</cite> and average the deviations in ten-day blocks (the individual measurements are shown as lighter points; error bars assume equal weighting for all points, but the results are not sensitive to any imposed S/N cutoff):
| |
| − |
| |
| − | [[Image:mapbased1.png | thumb|500px|center | Planck pointing before correction, measured by comparing point sources seen at 857 GHz to known IRAS positions. Light-colored points show individual source deviations, points with error bars give ten-day errors. Different colors correspond to the four individual Planck sky surveys. ]]
| |
| − |
| |
| − | An analysis performed directly in the timestream gives similar results, below (evaluated until the end of HFI operations in January 2012).
| |
| − |
| |
| − | [[Image:Pointing_offset_100--217GHz_CPP_better_coords.png | thumb|500px|center | The points give positions of individual objects (planets and bright radio sources) and the green dotted line labeled "PTCOR6" gives the corrected mean pointing, discussed below. (In this plot, "OD" refers to the number of days since launch.)]]
| |
| − | | |
| − | == A model for Planck Pointing ==
| |
| | | | |
| − | These analyses allow us to build a model for the pointing drift. The following describes the procedures used for the HFI detectors.
| + | The low frequency pointing correction, known as PTCOR has been reworked to include satellite "wobble" angle corrections (difference between the satellite spin frame and the rigid body reference frame). The move was necessitated by problems in the measured wobble angles beyond the HFI mission (beyond survey 5). We also observed that the long time scale features in the pointing correction were very well fitted by a template constructed from the solar distance. This template was further augmented by including a linear fit component and breaks at times of known thermal disturbance onboard the spacecraft. |
| | | | |
| − | The correction is based on the measurement of pointing offset directly from the timeline, on a small sample of known and bright radio sources and planets. First the beam shape of each detector is measured by stacking individual timeline observation of bright planets. This process is of course contaminated by pointing error, but this is reduced by allowing each pass on the planet to be slightly displaced in order to correct for the observed location of the planet. This process yields a very clean estimate of the beam of each detector.
| + | [[Image:pointing_offset_070--143GHz_dx11_planets_only_CPP_1_v2.png | thumb|500px|center| Measured cross-scan offsets after applying the low frequency pointing correction (shown in orange).]] |
| | | | |
| − | Those beams are then used to determine the offset of the observed location of the planets (Mars, Saturn, and Jupiter) and of a few (~10) bright radio sources. This offset are estimated using detectors at all frequencies for the planets, and only at 100GHz, 143GHz and 217GHz for the radio sources.
| + | [[Image:pointing_offset_070--143GHz_dx11_planets_only_CPP_2_v2.png | thumb|500px|center| Measured in-scan offsets after applying the low frequency pointing correction (shown in orange).]] |
| | | | |
| − | From the planet observations, one can recover the alignment of each detector in the focal plane, as well as a first pointing correction measured at the specific time of planet observations. This pointing correction is obtained by fitting splines on the planet observation from each detector. We further allow this correction to have a sharp jump between the second and third survey (the time of the [[LFI_design,_qualification,_and_performance#The_Sorption_Cooler|SCS switchover on OD 455]]).
| |
| | | | |
| − | This first pointing correction is further refined (at the lower HFI frequencies only) using the point sources observations in order to fill the period between planet observations. The radio source offsets require further treatment than the planet based offsets. First, the brightness of the sources being much smaller than planets, the offset on individual detector observation are very noisy, and we filter out the noise by building median offsets for each point source observation. Second, since the sources can be slightly extended we still observe systematic offset above and below the planet based pointing correction in a regular alternating pattern. This is due to the fact that we are observing those extended objects scanning in alternating directions, and our fit of those extended sources to our beam translate into this systematic alternating pattern. We thus allow for a small, arcsec correction of those offsets: i.e., each object is allowed a single offset displacement of order arc seconds in order to minimize the offset between different observations of the same object at different time.
| + | == References == |
| | + | <References /> |
| | + | |
| | | | |
| − | The resulting list of point source offsets is then merged with the planet offsets. Again a spline based correction is built fitting all of this data, and allowing rupture of continuity at the time of the SCS switchover and other major onboard event (typically between each surveys).
| |
| − |
| |
| − | Once we assume the full Planck pointing model and re-measure the position of Mars for this observation, we see sub-arcsecond deviations (as expected); this gives an indication of the purely numerical limitations of the method. Further planet observations show the small remaining uncorrected drift present in the pointing model (note that cross-scan positions are measured with considerably less data than in-scan positions due to the scan strategy):
| |
| − |
| |
| − | [[Image:S1vM1_v53.png | thumb|500px|center| Saturn 1 vs Mars 1 ]] [[Image:S2vM1_v53.png| thumb|500px|center| Saturn 2 vs Mars 1]]
| |
| − |
| |
| − | Redoing the single-survey map- and catalog-based computation with the corrected pointing shows that Planck has achieved the arcsecond-scale rms uncertainty of pointing:
| |
| − |
| |
| − | [[Image:mapbased_ptcor6.png | thumb|500px|center| As above, after correction by the "ptcor6" model. This plot shows both 545 GHz and 857 GHz sources.]]
| |
| − |
| |
| − | == References ==
| |
| − | <biblio force=false>
| |
| − | #[[References]]
| |
| − | </biblio>
| |
| | | | |
| | | | |
| − | [[Category:HFI/LFI joint data processing|0000]] | + | [[Category:HFI/LFI joint data processing|001]] |
Introduction and Summary[edit]
The overall geometry of the Planck focal plane is shown here:
In order to take full advantage of the Planck beams, we must know the individual detector pointing positions to a precision of better than several arcseconds, over the course of the entire mission.
Spacecraft pointing comes from the on-board star tracker sampled at 8 Hz between repointings (Attitude History File, AHF). This is translated via a series of three-dimensional rotations to a pointing for the centre of the focal plane and resampled to the HFI or LFI TOI data rate for convenience. We must then further rotate this focal-plane boresight pointing to the individual detector locations. Because neither the rotations from the star tracker to the boresight nor those from the boresight to the individual detectors are known exactly a priori, we must calibrate them using flight data.
Specifically, measurements of HFI and LFI detector pointing are based largely on observations of the brighter planets, with information from the much more frequent observations of lower-flux Galactic and extragalactic high-frequency sources used to monitor and build a model of overall pointing drift. This long-term drift of the spacecraft attitude is due to changes in the moment of inertia of the spacecraft, and also includes specific events which may induce sudden changes, essentially random as far as our ability to predict their effects is concerned. In this delivery HFI used a model (described below) to follow the pointing drift continuously, while LFI uses two different focal plane descriptions for the two time periods separated by operations perfomed on the instrument that modified the thermal behaviour. The two approach are consistent to better than a few arcsec.
Note that for HFI the resulting pointing model cannot easily be directly compared to a physical/optical model: in particular, it includes a phase shift in the scan direction from the convolution and deconvolution of the detector transfer function, which is complex in the Fourier domain (see Planck-2013-VII[1]). This phase shift was not measured during normal operations, but a short campaign during which the spacecraft was spun at a higher rate will be used to determine these offsets in future date releases. Comparison with the initial optical model indicates that the in-scan change due to this phase shift is of the order of 1 arcminute. Note also that aberration is corrected in all observations.
The final pointing model is measured to be better than 2 arcsecond rms in the co-scan and cross-scan directions averaged over ten-day periods, as shown below. Note that there are larger hourly drifts of up to 10 arcseconds due to interference from the radiometer electronics box assembly (REBA) as discussed more fully in Planck-2013-VI[2].
Stellar Aberration[edit]
The corrected quaternions are interpolated using Spherical Linear Interpolation algorithm and transformed in cartesian vector, which we call [math] DPT [/math]. For each sample the stellar aberration correction is applied:
- [math] DPT = DPT - {v_{sat} \over c } [/math]
where [math] v_{sat} [/math] is the satellite velocity and [math] c [/math] is the speed of light. After this operation the vector is normalized.
Finally the cartesian vetor is converted in Ecliptic Coordinates, the detector pointing.
Beam Rotation[edit]
The rotation of the beam with respect to North is the [math] \psi [/math] angle and is computed rotating the corrected quaternions [math] Q [/math].
The resulting rotation matrix represents the rotation of the beam, the [math] \psi [/math] angle is then:
- [math] \psi = -\arctan (R[0][1],R[0][0]) [/math]
Focal plane drift[edit]
The low frequency pointing correction, known as PTCOR has been reworked to include satellite "wobble" angle corrections (difference between the satellite spin frame and the rigid body reference frame). The move was necessitated by problems in the measured wobble angles beyond the HFI mission (beyond survey 5). We also observed that the long time scale features in the pointing correction were very well fitted by a template constructed from the solar distance. This template was further augmented by including a linear fit component and breaks at times of known thermal disturbance onboard the spacecraft.
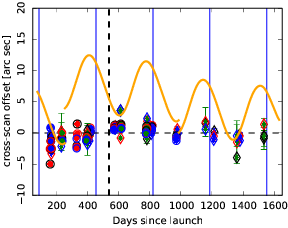
Measured cross-scan offsets after applying the low frequency pointing correction (shown in orange).
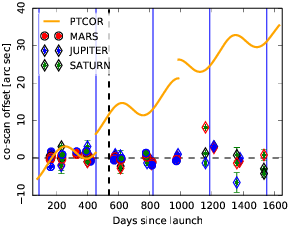
Measured in-scan offsets after applying the low frequency pointing correction (shown in orange).
References[edit]
- ↑ Planck 2013 results. VII. HFI time response and beams, Planck Collaboration, 2014, A&A, 571, A7
- ↑ Planck 2013 results. VI. High Frequency Instrument Data Processing, Planck Collaboration, 2014, A&A, 571, A6


